Ce bref guide et ce script python est adapté du projet de Savetheclocktower (anglais) trouvé sur GitHub.
¶ But
Ce script est destiné à ceux qui veulent un bouton de volume physique sur un projet Recalbox, comme les machines d'arcade. Ce script est utile pour les bornes d'arcade avec des haut-parleurs qui n'ont pas leur propre bouton de volume physique, ou qui auraient des difficultés à déplacer le bouton de contrôle du haut-parleur près de l'utilisateur.
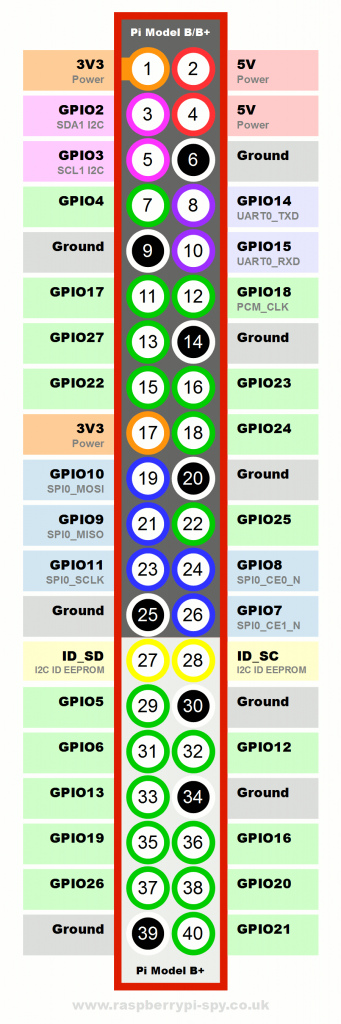
Ce script utilise un codeur rotatif standard à 5 broches et a été testé sur le codeur d'Adafruit. Cinq fils sont nécessaires pour ce codeur rotatif : trois pour la partie bouton (A, B et terre), et deux pour la partie touche (commun et terre). Voici une référence pour les broches GPIO de Raspberry Pi.
| Description | BCM # | Board # |
|---|---|---|
| bouton A | GPIO 26 | 37 |
| bouton B | GPIO 19 | 35 |
| bouton de la terre | pin de la terre en-dessous du GPIO 26 | 39 |
| touche commun | GPIO 13 | 33 |
| touche de la terre | pin de la terre opposé au GPIO 13 | 34 |
Vous pouvez utiliser les broches que vous voulez ; il suffit de mettre à jour le script volume-monitor.sh si vous les modifiez. Si vous n'avez pas de bouton poussoir dans votre codeur rotatif, laissez les broches inoccupées. N'importe quelle broche de terre peut être utilisée, ces broches sont juste suggérées à cause de leur proximité.
¶ Volume daemon
Le script ci-dessous fonctionne comme suit : il utilise les broches spécifiées, et lorsque le bouton est tourné d'une manière ou d'une autre, il utilise les états des broches A et B pour savoir si le bouton a été tourné vers la gauche ou vers la droite. Ainsi, il sait s'il faut augmenter ou diminuer le volume du système en réponse, ce qu'il fait avec le programme de ligne de commande Amixer.
- Pour installer le script dans votre Recalbox : vous devez remonter la partition en lecture-écriture via SSH.
- Créez ou modifiez votre script
volume-monitor.pydans/recalbox/scriptsvia nano :
nano /recalbox/scripts/volume-monitor.py
- Copiez et collez le script du bas dans le fichier, puis enregistrez le fichier par la commande
Ctrl+X:
#!/usr/bin/env python2
"""
The daemon responsible for changing the volume in response to a turn or press
of the volume knob.
The volume knob is a rotary encoder. It turns infinitely in either direction.
Turning it to the right will increase the volume; turning it to the left will
decrease the volume. The knob can also be pressed like a button in order to
turn muting on or off.
The knob uses two GPIO pins and we need some extra logic to decode it. The
button we can just treat like an ordinary button. Rather than poll
constantly, we use threads and interrupts to listen on all three pins in one
script.
"""
import os
import signal
import subprocess
import sys
import threading
from RPi import GPIO
from multiprocessing import Queue
DEBUG = False
# SETTINGS
# ========
# The two pins that the encoder uses (BCM numbering).
GPIO_A = 26
GPIO_B = 19
# The pin that the knob's button is hooked up to. If you have no button, set
# this to None.
GPIO_BUTTON = 13
# The minimum and maximum volumes, as percentages.
#
# The default max is less than 100 to prevent distortion. The default min is
# greater than zero because if your system is like mine, sound gets
# completely inaudible _long_ before 0%. If you've got a hardware amp or
# serious speakers or something, your results will vary.
VOLUME_MIN = 60
VOLUME_MAX = 96
# The amount you want one click of the knob to increase or decrease the
# volume. I don't think that non-integer values work here, but you're welcome
# to try.
VOLUME_INCREMENT = 1
# (END SETTINGS)
#
# When the knob is turned, the callback happens in a separate thread. If
# those turn callbacks fire erratically or out of order, we'll get confused
# about which direction the knob is being turned, so we'll use a queue to
# enforce FIFO. The callback will push onto a queue, and all the actual
# volume-changing will happen in the main thread.
QUEUE = Queue()
# When we put something in the queue, we'll use an event to signal to the
# main thread that there's something in there. Then the main thread will
# process the queue and reset the event. If the knob is turned very quickly,
# this event loop will fall behind, but that's OK because it consumes the
# queue completely each time through the loop, so it's guaranteed to catch up.
EVENT = threading.Event()
def debug(str):
if not DEBUG:
return
print(str)
class RotaryEncoder:
"""
A class to decode mechanical rotary encoder pulses.
Ported to RPi.GPIO from the pigpio sample here:
http://abyz.co.uk/rpi/pigpio/examples.html
"""
def __init__(self, gpioA, gpioB, callback=None, buttonPin=None, buttonCallback=None):
"""
Instantiate the class. Takes three arguments: the two pin numbers to
which the rotary encoder is connected, plus a callback to run when the
switch is turned.
The callback receives one argument: a `delta` that will be either 1 or -1.
One of them means that the dial is being turned to the right; the other
means that the dial is being turned to the left. I'll be damned if I know
yet which one is which.
"""
self.lastGpio = None
self.gpioA = gpioA
self.gpioB = gpioB
self.callback = callback
self.gpioButton = buttonPin
self.buttonCallback = buttonCallback
self.levA = 0
self.levB = 0
GPIO.setmode(GPIO.BCM)
GPIO.setup(self.gpioA, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(self.gpioB, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.add_event_detect(self.gpioA, GPIO.BOTH, self._callback)
GPIO.add_event_detect(self.gpioB, GPIO.BOTH, self._callback)
if self.gpioButton:
GPIO.setup(self.gpioButton, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.add_event_detect(self.gpioButton, GPIO.FALLING, self._buttonCallback, bouncetime=500)
def destroy(self):
GPIO.remove_event_detect(self.gpioA)
GPIO.remove_event_detect(self.gpioB)
GPIO.cleanup()
def _buttonCallback(self, channel):
self.buttonCallback(GPIO.input(channel))
def _callback(self, channel):
level = GPIO.input(channel)
if channel == self.gpioA:
self.levA = level
else:
self.levB = level
# Debounce.
if channel == self.lastGpio:
return
# When both inputs are at 1, we'll fire a callback. If A was the most
# recent pin set high, it'll be forward, and if B was the most recent pin
# set high, it'll be reverse.
self.lastGpio = channel
if channel == self.gpioA and level == 1:
if self.levB == 1:
self.callback(1)
elif channel == self.gpioB and level == 1:
if self.levA == 1:
self.callback(-1)
class VolumeError(Exception):
pass
class Volume:
"""
A wrapper API for interacting with the volume settings on the RPi.
"""
MIN = VOLUME_MIN
MAX = VOLUME_MAX
INCREMENT = VOLUME_INCREMENT
def __init__(self):
# Set an initial value for last_volume in case we're muted when we start.
self.last_volume = self.MIN
self._sync()
def up(self):
"""
Increases the volume by one increment.
"""
return self.change(self.INCREMENT)
def down(self):
"""
Decreases the volume by one increment.
"""
return self.change(-self.INCREMENT)
def change(self, delta):
v = self.volume + delta
v = self._constrain(v)
return self.set_volume(v)
def set_volume(self, v):
"""
Sets volume to a specific value.
"""
self.volume = self._constrain(v)
output = self.amixer("set 'PCM' unmute {}%".format(v))
self._sync(output)
return self.volume
def toggle(self):
"""
Toggles muting between on and off.
"""
if self.is_muted:
output = self.amixer("set 'PCM' unmute")
else:
# We're about to mute ourselves, so we should remember the last volume
# value we had because we'll want to restore it later.
self.last_volume = self.volume
output = self.amixer("set 'PCM' mute")
self._sync(output)
if not self.is_muted:
# If we just unmuted ourselves, we should restore whatever volume we
# had previously.
self.set_volume(self.last_volume)
return self.is_muted
def status(self):
if self.is_muted:
return "{}% (muted)".format(self.volume)
return "{}%".format(self.volume)
# Read the output of `amixer` to get the system volume and mute state.
#
# This is designed not to do much work because it'll get called with every
# click of the knob in either direction, which is why we're doing simple
# string scanning and not regular expressions.
def _sync(self, output=None):
if output is None:
output = self.amixer("get 'PCM'")
lines = output.readlines()
if DEBUG:
strings = [line.decode('utf8') for line in lines]
debug("OUTPUT:")
debug("".join(strings))
last = lines[-1].decode('utf-8')
# The last line of output will have two values in square brackets. The
# first will be the volume (e.g., "[95%]") and the second will be the
# mute state ("[off]" or "[on]").
i1 = last.rindex('[') + 1
i2 = last.rindex(']')
self.is_muted = last[i1:i2] == 'off'
i1 = last.index('[') + 1
i2 = last.index('%')
# In between these two will be the percentage value.
pct = last[i1:i2]
self.volume = int(pct)
# Ensures the volume value is between our minimum and maximum.
def _constrain(self, v):
if v < self.MIN:
return self.MIN
if v > self.MAX:
return self.MAX
return v
def amixer(self, cmd):
p = subprocess.Popen("amixer {}".format(cmd), shell=True, stdout=subprocess.PIPE)
code = p.wait()
if code != 0:
raise VolumeError("Unknown error")
sys.exit(0)
return p.stdout
if __name__ == "__main__":
gpioA = GPIO_A
gpioB = GPIO_B
gpioButton = GPIO_BUTTON
v = Volume()
def on_press(value):
v.toggle()
print("Toggled mute to: {}".format(v.is_muted))
EVENT.set()
# This callback runs in the background thread. All it does is put turn
# events into a queue and flag the main thread to process them. The
# queueing ensures that we won't miss anything if the knob is turned
# extremely quickly.
def on_turn(delta):
QUEUE.put(delta)
EVENT.set()
def consume_queue():
while not QUEUE.empty():
delta = QUEUE.get()
handle_delta(delta)
def handle_delta(delta):
if v.is_muted:
debug("Unmuting")
v.toggle()
if delta == 1:
vol = v.up()
else:
vol = v.down()
print("Set volume to: {}".format(vol))
def on_exit(a, b):
print("Exiting...")
encoder.destroy()
sys.exit(0)
debug("Volume knob using pins {} and {}".format(gpioA, gpioB))
if gpioButton != None:
debug("Volume button using pin {}".format(gpioButton))
debug("Initial volume: {}".format(v.volume))
encoder = RotaryEncoder(GPIO_A, GPIO_B, callback=on_turn, buttonPin=GPIO_BUTTON, buttonCallback=on_press)
signal.signal(signal.SIGINT, on_exit)
while True:
# This is the best way I could come up with to ensure that this script
# runs indefinitely without wasting CPU by polling. The main thread will
# block quietly while waiting for the event to get flagged. When the knob
# is turned we're able to respond immediately, but when it's not being
# turned we're not looping at all.
#
# The 1200-second (20 minute) timeout is a hack; for some reason, if I
# don't specify a timeout, I'm unable to get the SIGINT handler above to
# work properly. But if there is a timeout set, even if it's a very long
# timeout, then Ctrl-C works as intended. No idea why.
EVENT.wait(1200)
consume_queue()
EVENT.clear()
- Marquer le script comme un fichier exécutable :
chmod +x /recalbox/scripts/volume-monitor.py
- Pour que le script de contrôle du volume démarre avec votre système, procédez comme suit :
touch ~/custom.sh && chmod u+x ~/custom.sh
- Ouvrez le script custom.sh dans l'éditeur nano :
nano ~/custom.sh
- Enfin, copiez et collez ce qui suit dans le fichier custom.sh et enregistrez avec Ctrl+X :
python /recalbox/scripts/volume-monitor.py
- Redémarrez votre Recalbox en utilisant la commande de redémarrage :
reboot
- Profitez du nouveau contrôle de volume de votre matériel.
¶ Modifications du script
Ces modifications se trouvent toutes sous la rubrique "Settings" du script Volume-monitor.py.
Veuillez patienter 3 secondes après l'apparition du menu d'Emulationstation AVANT de toucher le codeur rotatif. Tourner le codeur plus tôt peut bloquer le script et rendre le codeur insensible.
Si vous souhaitez modifier les deux broches par défaut utilisées par le codeur, modifiez les lignes suivantes dans le script. Veillez à utiliser les codes de numérotation BCM.
GPIO_A = 26
GPIO_B = 19
Si vous voulez changer la broche à laquelle le bouton poussoir est accroché, alors modifiez la ligne correspondante dans le script ci-dessous. Veillez à utiliser les codes de numérotation BCM. Si vous n'avez pas de bouton, réglez ce paramètre sur Aucun.
GPIO_BUTTON = 13
Si vous souhaitez modifier la plage (c'est-à-dire : min & max) que le script module le volume du Raspberry Pi, alors éditez la ligne correspondante dans le script ci-dessous. Les chiffres sont exprimés en pourcentage. Le max par défaut est inférieur à 100 pour éviter toute distorsion. Le min par défaut est supérieur à zéro car si votre système est comme le mien, le son devient complètement inaudible bien avant 0%. Si vous avez un amplificateur matériel ou des haut-parleurs de qualité ou autre, vos résultats varieront.
VOLUME_MIN = 60
VOLUME_MAX = 96
Si vous souhaitez que le volume de votre système change plus rapidement et soit plus sensible, modifiez la ligne correspondante dans le script ci-dessous. Le paramètre par défaut est 1, passez à 2 pour doubler le taux de changement de volume.
VOLUME_INCREMENT = 1
¶ Comment désinstaller le script
Répétez les étapes 7 et 8 ci-dessus, mais en supprimant la ligne ajoutée à l'étape 8 ou en la commentant par l'ajout d'un hachage, par exemple la ligne se lit comme suit :
#python /recalbox/scripts/volume-monitor.py
¶ Remerciements
- Substring pour l'aide qu'il nous a apporté en rendant possible ce guide et la modification de Recalbox.
- Tous les autres développeurs de Recalbox pour avoir rendu ce merveilleux projet disponible.
- savetheclocktower pour le code du projet original et pour son aide dans la conversion en Python2.